ELEMENTOS
1 : Unidad de control
 Si estás leyendo este post porque de alguna forma te interesa el mundo de la robótica, seguro que ya tienes una idea de qué es la unidad de control de un robot.
Si estás leyendo este post porque de alguna forma te interesa el mundo de la robótica, seguro que ya tienes una idea de qué es la unidad de control de un robot.
La unidad de control, realiza principalmente 2 acciones:
- está «pendiente» de las señales se reciben a través de los sensores del robot (luz, corriente eléctrica, calor, etc.).
- «ordena» a los actuadores del robot (motores, luces, etc.) que realicen acciones.
De forma muy resumida y general, un robot funciona así:
- Cuando pones en marcha el robot, se empiezan a realizar las instrucciones que están almacenadas en la memoria de la unidad de control.
- Si el robot dispone de algún tipo de sensor, la unidad de control comprueba qué datos llegan.
- Teniendo en cuenta los datos recibidos y las instrucciones del programa, la unidad de control ejecuta, o no, alguna acción determinada.
2 : Motores
Motores de corriente continua

También se conocen como motores CC o DC. Son los motores más sencillos de conectar y usar para robots de iniciación. El voltaje para aplicaciones de pequeños robots suele estar entre 3 y 12 voltios, aunque hay motores que trabajan con otros valores.
Precisamente variando el voltaje que se les aplica se puede controlar la velocidad a la que giran estos motores . Nunca debes usar más voltaje del que admite el motor, ya que se quemará.
Motores paso a paso
Aunque el principio eléctrico de funcionamiento de los motores paso a paso es el mismo que el de los motores de corriente continua, existe una gran diferencia en el uso y conexiones de ambos.
Con estos motores es posible controlar con exactitud el ángulo que queremos girar. Esto permite conseguir pequeños movimientos muy precisos.
Sin embargo, a cambio de mayor control y precisión, el uso se complica debido a que no basta con aplicar corriente para que funcionen. Es necesario usar más cables para enviar una serie de pulsos (señales eléctricas) que van activando en orden las bobinas que el motor lleva dentro.
3 : Sensores
Si piensas que los sensores de un robot son similares a los sentidos humanos, no vas desencaminado.
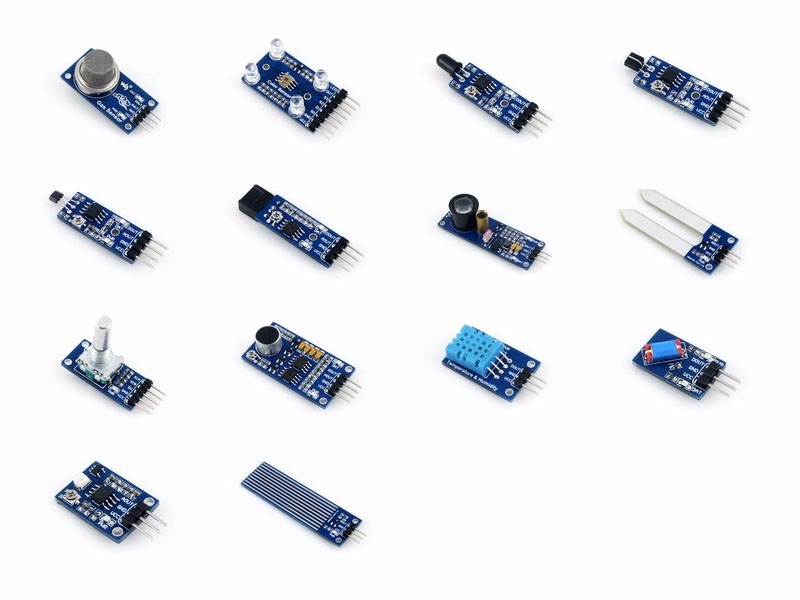 Existen gran cantidad de sensores, pero todos tienen una finalidad: percibir «algo». Ese «algo» puede ser muy variado: un contacto, una fuente de luz o gas, campos magnéticos, un movimiento, etc.
Existen gran cantidad de sensores, pero todos tienen una finalidad: percibir «algo». Ese «algo» puede ser muy variado: un contacto, una fuente de luz o gas, campos magnéticos, un movimiento, etc.
Afortunadamente para los que se inician en el mundo de la robótica, la primera toma de contacto con los sensores no es difícil.
Eso sí, mi consejo es que vayas probando los sensores uno por uno, antes de conectar el resto de componentes a la unidad de control. Así, como no habrá otros elementos que compliquen las conexiones, podrás entender el funcionamiento de cada tipo de sensor.
4 : Fuente de energía
Sin energía, tu robot no hará gran cosa.
 Para suministrar energía al robot lo más sencillo y barato son las baterías o pilas. Puedes construir un micro-robot que funcione con una pila de tipo botón, pero para comenzar lo más facil y asequible para tu bolsillo serán las pilas de 1,5 y 9 voltios.
Para suministrar energía al robot lo más sencillo y barato son las baterías o pilas. Puedes construir un micro-robot que funcione con una pila de tipo botón, pero para comenzar lo más facil y asequible para tu bolsillo serán las pilas de 1,5 y 9 voltios.
Juntando varias pilas de 1,5 V en serie (el polo negativo de una se conecta con el polo positivo de la siguiente o viceversa), puedes conseguir el voltaje que necesites.
Pero también hay que tener en cuenta la cantidad de corriente que necesite tu robot. No puedes pretender alimentar tu flamante robot de 4 motores, 2 servos, 5 sensores y la unidad de control con 4 pilas de tamaño AAA, y encima pretender que funcione 2 horas seguidas. En general, para pilas o combinaciones de un mismo voltaje, mayor tamaño significa mayor tiempo de funcionamiento.
5 : Placas de prototipo de circuitos
¿Qué son y para qué sirven?
 Se trata de un bloque de plástico con orificios en su superficie. En estos orificios se insertan los componentes electrónicos y cables, haciendo contacto con unas láminas metálicas que hay en el interior. Como cada fila de orificios comparten una misma lámina metálica, si insertamos otros componentes en la misma fila hacen contacto eléctrico.
Se trata de un bloque de plástico con orificios en su superficie. En estos orificios se insertan los componentes electrónicos y cables, haciendo contacto con unas láminas metálicas que hay en el interior. Como cada fila de orificios comparten una misma lámina metálica, si insertamos otros componentes en la misma fila hacen contacto eléctrico.
Las placas para prototipado (conocidas también como protoboard o breadboard) son muy útiles, diría imprescindibles, cuando empezamos en electrónica o robótica. Nos permiten conectar entre sí elementos eléctricos o electrónicos rápidamente, sin emplear soldadura ni tornillos. Eso sí, hay que tener en cuenta que no están diseñadas para altas intensidades de corriente o alto voltaje.



Comentarios
Publicar un comentario